Archerfish respond to a hunting robot conspecific- Brown et al. 2021
Abstract:
While the unique hunting behavior of archerfish has received considerable scientific attention, the specific social cues that govern behaviors like intraspecific kleptoparasitism in the species are less understood. This paper asks whether the use of a robotic facsimile representing an archerfish can elicit a social response if it approximates an archerfish’s appearance, along with key features of its hunting behavior. We found that the fish respond to the robot when it hunted, as indicated by decreasing distances between the robot and fish (and among the fish) during the robot’s hunting behavior sequence, as well as higher net transfer entropy when the robot was hunting. These effects were present even when the robot’s “hunt” was unproductive and did not result in food. The temporal pattern of fish approach to the robot and each other indicated that the segment of robot hunting behavior proximal to the robotic facsimile shot elicited fish behavior initially. However, earlier cues in the robot’s hunting sequence became important following more experience with a food contingency. This indicates that further studies could use a robotic facsimile to conduct a detailed stimulus analysis, changing aspects of the robot’s appearance and behavior to uncover the basic mechanisms of information transfer among individuals in a social hunting scenario. -> Taken word for word
Introduction:
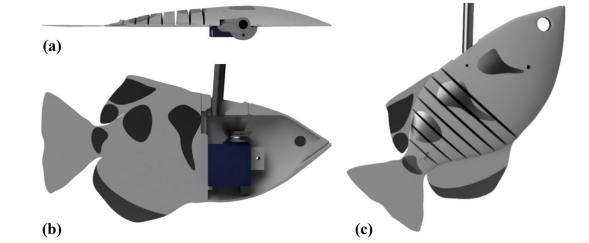
Archerfish are commonly known for their ability to shoot insects from branches using jets of water. This means these fish have the ability to hit moving targets, consider optical diffractions from water surface, consider prey size and and make complex decisions about optimal post-shot motion. They also engage in kleptoparasitism which means stealing shot down prey from other group members, since these fish do hunt in social groups. Given the inability to control a singular individual to act a certain way, they observed whether they could study social interactions using a robotic conspecific. This study specifically wanted to lay the groundwork for using a robotic conspecific in archerfish experiments for future studies. They observed whether other fish would react as they would for a real conspecific when the robot engaged in hunting behaviours.
Methods:
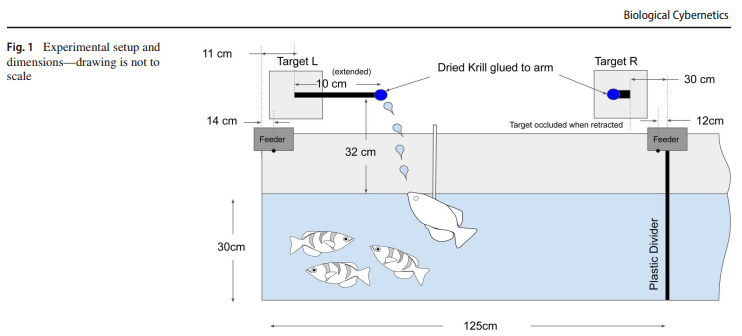
n= 3 banded archerfish were used for this experiment. 2 types of tests were done, the first was with food on an arm and the robot would engage in hunting behaviour but the food would not drop. The second type of test was when the food reward would drop to see whether this had an effect on their behaviour. Control trials were when the robot would ignore the arm when food was present. Check methods for in depth info on how robot movement was determined.
Results:
Session 1 : The trend between control and experimental trials was that the distance b/t robot and fish decreased for experimental trials over the course of trials but not for control.
Session 2: since the robot would hunt at random times to replicate natural hunting mechanisms, they found that the fish would decrease distance from the robot at times that the robot hunted in the previous session.
Discussion:
In session 1 the robot showed that the other fish recognized it as a conspecific and that only hunting behaviour caused them to come closer while in control trials they were not. During these trials food did not drop, therefore the hunting and shooting action is enough to influence other archerfish without it providing food. In Session 2 they found that the other fish would decrease distance to the robot following its shot, but in later trials found that they would decrease distance to the robot following activation of the hunting sequence. In terms of distance from fish-fish there was no significant change b/t the earlier and later trials. check what net entropy transfer is.
Implications and Future Work:
The effectiveness of the robot is quite visible given the evidence from the other fish. Even on the first session the other fish reacted as if it was a conspecific, especially important b/c no food reward was ever given during these trials. Therefore no encouragement was provided for the behaviour, except for what was already ingrained in them which was to follow a conspecific. Future studies will hope to break down exactly which parts of the robot are the best to elicit the responses from the conspecifics, as in which cues they most rely on.
